|
AMON sezione sommergibili testi, foto, progetto e realizzazione di Paolo Saccenti 12 dicembre 2005
per prelevare il file:
|
||||||
|
PROGETTO 877 GRANAY DESIGNAZIONE NATO CLASSE “KILO” |
 |
|||||
Nel 1979, nel Rubin Central Maritime Bureau, a San Pietroburgo, fu iniziato il progetto di un sommergibile SSK (sommergibile anti sommergibile) destinato alla protezione delle basi e delle istallazioni costiere. Il sommergibile adatto a questo scopo doveva essere piccolo, veloce e molto silenzioso. Per la propulsione fu scelto il sistema diesel elettrico che garantiva livelli di rumorosità molto inferiori agli apparati nucleari disponibili a quel tempo ed una forma dello scafo a goccia che consentiva di avere buone prestazioni velocistiche e discreta autonomia. Al tipo 877 seguirono i tipi 636 e 877 EKM negli anni 90 e fino a tutt’oggi, con caratteristiche ancora migliorate in termini di silenziosità e prestazioni nautiche. Il Kilo, nelle sue varianti, è ritenuto uno dei migliori sommergibili convenzionali del mondo, e questo è avvalorato dal notevole successo commerciale nei paesi asiatici e dell’ex blocco sovietico. Ne sono infatti venduti dieci alla marina Indiana otto alla Cina , oltre che all’ Iran, all’Algeria, alla Polonia a alla Romania. I battelli classe Kilo sono stati costruiti nei cantieri di Komosomolsk e di Nizhny Novgorod. Attualmente vengono costruiti nei Cantieri dell'Ammiragliato di San Pietroburgo.
Le caratteristiche del tipo 877 sono le seguenti: dislocamento in superficie 2.300 ton velocità in superficie 12 nodi velocità in immersione 25 nodi lunghezza 72 m baglio massimo 9,9 m altezza 6,6m massima profondità operativa 300 m propulsione 2x1350 kW diesel generatori, 1x 5.500 Hp propulsione elettrica equipaggio 52 membri
Armamento: 6 tubi lanciasiluri per 18 siluri calibro 533 mm o 24 mine missili SA-N-8 Strela o 8 SA-N-10 Gimlet
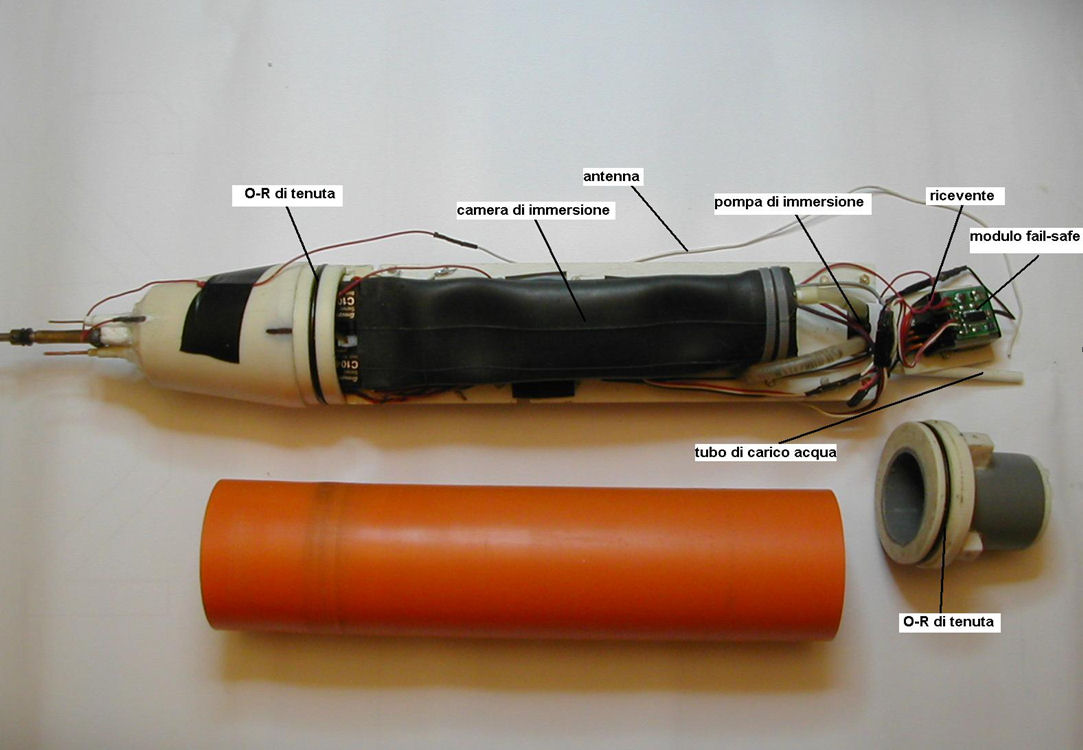
Sistemi : sonar attivo/passivo MGK-400 Rubikon radar MRK-50 IL MODELLO SCALA 1:144 LUNGHEZZA 530 mmIl modello radiocomandato è stato realizzato utilizzando come base di partenza il kit statico della Trumpeter. La forma a goccia dello scafo ha consentito di utilizzare a pieno lo spazio interno munendo il modello di una cassa allagabile e di una pompa di immersione. Lo scafo a tenuta è stato realizzato con un tubo da grondaia di PVC, tornito fino al diametro di 60,5 mm per entrare nello scafo del kit. Le sezioni poppiera e prodiera sono state ricavate da un tondo pieno, sempre di PVC, lavorate su spina al tornio. Sul fondo di prua è stato inserito, in un foro eccentrico, un tronchetto di tubo, da idraulica diametro 32 mm, chiuso con un tappo, sempre ricavato da tondo di PVC. All’interno si trovano i componenti elettronici ed il sistema di immersione statico, ricavato da uno spezzone di camera d’aria di ciclomotore. La camera è chiusa ad una estremità con il mastice auto vulcanizzante usato per le toppe ed all’altra estremità incollato con il Bostik su un semitondo di PVC in cui è inserito il tubetto di carico. |
||||||
|
|
 |
|||||
|
Comandi 4 canali · Timone di direzione · Timoni di profondità anteriore e posteriore · Pompa di immersione/emersione · Regolatore / invertitore di velocità
Elenco componenti: N° 2 microservi Graupner C-1041 per i timoni di direzione e profondità N° 1 switcher Robbe cod: 8319 N° 1 regolatore di velocità Graupner Micro 10 N° 1 pompa ad ingranaggi Robbe p.n. 1563 N° 1 ricevente Hitec a 4 canali N° 1 motore Robbe Navy 380 con riduttore 1:3 N° 5 batterie al Ni-Cd da 900 mA/h N°1 modulo fail safe Conrad CMS 0225 304
|
||||||
|
Descrizione della costruzione: Lo scafo della scatola di montaggio è diviso secondo un piano orizzontale da prua a poppa. La parte inferiore è in due metà, divisa secondo un piano verticale. |
||||||
|
|
Ho segato la parte superiore poppiera e successivamente, dopo aver incollato il resto ho segato la parte prodiera come mostrato nella foto.
|
|||||
|
|
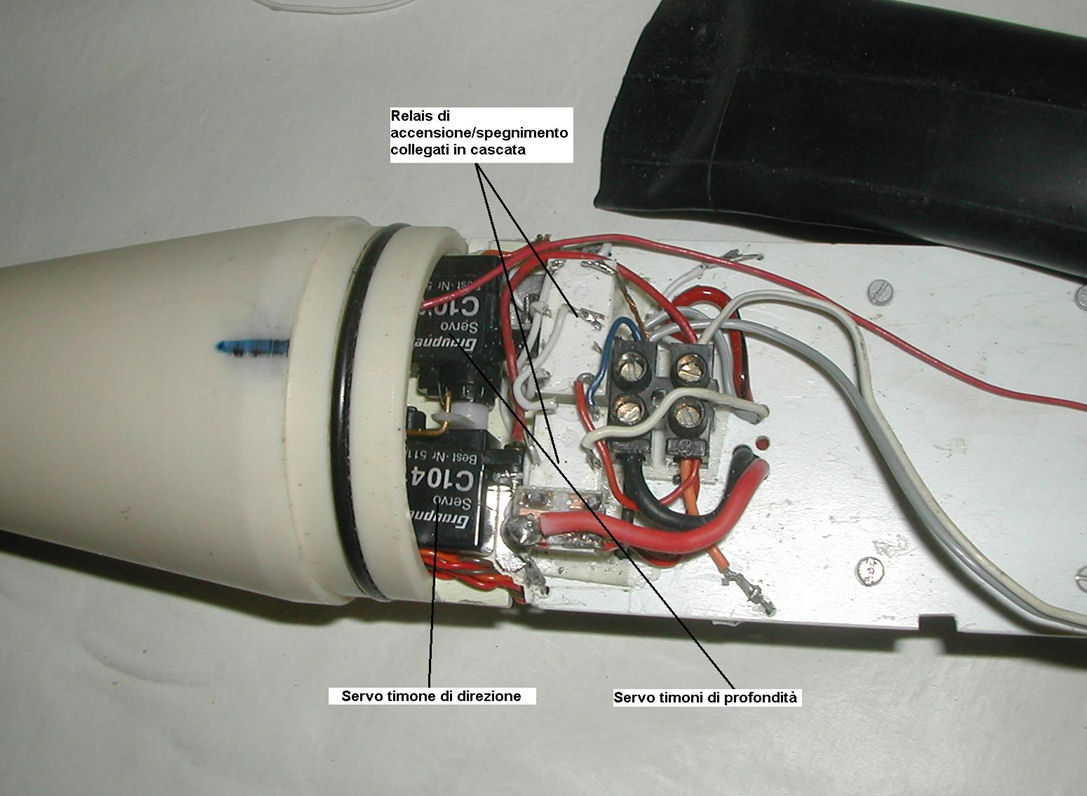
I componenti interni sono montati su una basetta di plastica (stirene) spessore 2 mm, rinforzati da due angolari di alluminio con sezione ad “L” imbullonati alla basetta. Gli angolari sono stati ricavati da un profilato ad “U”, segato longitudinalmente a metà. Nella parte inferiore della basetta sono montate le batterie, la pompa di immersione, il variatore di velocità, la ricevente ed il motore di propulsione. Il motore è collegato all’asse dell’elica tramite una coppia di ingranaggi con rapporto di trasmissione 1:3, per ottenere una velocità di rotazione dell’elica di circa 1500 RPM, alla massima velocità del battello. Sulla parte superiore della basetta sono montati i due servi dei timoni di profondità e di direzione che comandano le aste che escono dalla scafo. L’impermeabilità è assicurata da delle tenute a grasso. A tale proposito si veda la descrizione nella sezione tecnica del nostro sito. |
|||||
|
|
 |
|||||
|
Da notare le molle inserite nei tubi di silicone che collegano la pompa alla camera di immersione ed alla presa a mare. Lo scopo delle molle è di evitare che i tubi si schiaccino quando si inserisce la basetta nel cilindro arancione. Il comando della pompa di immersione avviene tramite uno switcher Robbe cod. 8319. Tra lo switcher e la ricevente è interposto il modulo fail safe che, in mancanza di segnale, comanda a scarico la pompa di immersione. |
||||||
|
|
Il sistema di accensione e spegnimento del battello è realizzato con un circuito azionato da una calamita. A tale proposito si veda, sempre nella sezione tecnica del nostro sito, la descrizione. Accostando la calamita al lato destro dello scafo si alimentano gli apparati, mentre accostando la calamita dalla parte opposta si spegne tutto. I due reed sono collegato ad un relais DPDT che a sua volta è collegato in cascata ad un secondo ralais che alimenta la ricevente ed il regolatore di velocità. La pompa di immersione è collegata direttamente alle batterie, tramite i due relais, senza passare dal sistema di accensione. |
|||||
|
|
 |
|||||
|
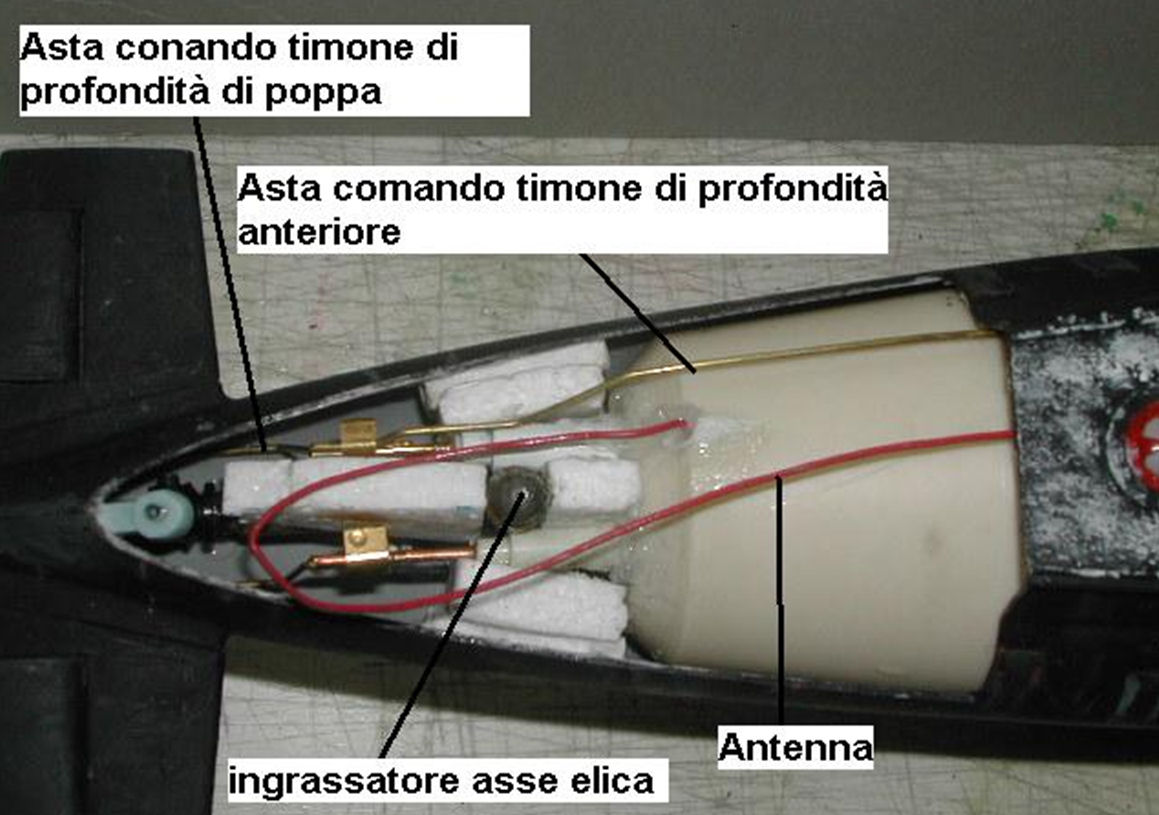
I comandi dei timoni sono realizzati con delle aste, azionate dai servi, che escono da poppa. Il comando del timone di direzione è stato realizzato con un’asta a forma di zeta, collegata ad una squadretta solidale con l’asse del timone. Il comando dei timoni di profondità, realizzato con un solo servo, ha richiesto un po’ più di immaginazione. All’asta che esce dallo scafo sono infatti collegati i due rinvii che muovono i timoni di prua e di poppa. Il collegamento ai timoni di poppa è analogo al quello con il timone di direzione, mentre il collegamento con quelli di prua passa attraverso una leva che ha lo scopo di invertire il moto, vedi foto. I timoni di profondità devono infatti essere ambedue a scendere o a salire, cioè non essere “paralleli”, per consentire al battello di immergersi dinamicamente. L’asse dell’elica è stato fatto utilizzando un elettrodo da saldatura diametro 4 mm, opportunamente “svestito”di inox 316. L’astuccio dell’asse è un tubo di ottone con saldati alle estremità due tubetti di diametro inferiore che fanno da cuscinetti. A tale proposito si veda l’articolo sulle tenute , sempre nella sezione tecnica del nostro sito. L’elica è una Raboesh a sei pale a sciabola di diametro e passo 40 mm . Il diametro è sproporzionato rispetto alla scala del modello, ma per immergersi dinamicamente occorre una notevole spinta, a maggior riprova che un modello non può essere totalmente in scala con l’originale.
Navigazione:Far navigare il modello non è stato facile. Purtroppo l’intenzione di realizzare l’immersione statica mi ha fatto sfruttare tutto lo spazio disponibile dentro lo scafo esterno, lasciando così poco volume a disposizione per le zavorre ed i galleggianti di compensazione. Il battello inizialmente si immergeva troppo e quindi ho dovuto sfruttare tutti gli anfratti per inserire dei pezzetti di polistirolo per compensare la zavorra. La zavorra del resto non può essere ridotta drasticamente, altrimenti la stabilità trasversale non è sufficiente a compensare la coppia di reazione dell’elica e delle masse rotanti. Dopo parecchie prove, alfine sono riuscito ad avere un assetto soddisfacente, ma mi piacerebbe che la linea di galleggiamento fosse più bassa. Il battello si immerge bene dinamicamente, e staticamente basta imbarcare poca acqua per vederlo scendere. Altro problema in uno scafo così piccolo è l’elasticità della camera di immersione e la compressione interna dell’aria quando si imbarca l’acqua di zavorra. Infatti dopo la prima immersione, in cui un po’ d’aria fuoriesce dalle tenute, la camera vuota tende piano piano a imbarcare un po’ d’acqua anche a pompa ferma, facendo appoppare il battello. Bisogna quindi di tanto in tanto comandare la pompa a scarico. Tutta colpa della difficoltà di fare una valvola di intercettazione sufficientemente piccola, che strozzi il tubo di carico/scarico quando la pompa non è azionata. Questo è un messaggio agli amici modellisti ! |
||||||
|
|
 |
|||||
 |
|
|||||
|
Qui sotto il Kilo in navigazione :
|
||||||
|
|
 |
|||||
|
|
|
|||||
 |
||||||
|
Ecco infine il Kilo nella sua custodia per il trasporto, che io consiglio sempre, per evitare danni. |
||||||
 |
 |
|||||
|
per prelevare il file:
|
||||||